This defines Collision caching as well as the ability to sort into buckets. More...
#include <Collision.h>
 Collaboration diagram for Collision:
Collaboration diagram for Collision: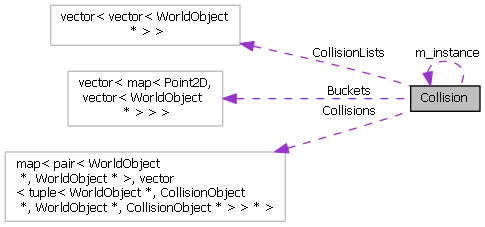
Public Member Functions | |
| Collision () | |
| ~Collision () | |
| bool | collided (WorldObject *a, WorldObject *b) |
| Lets us know if a collision had precviously occurred (order independent). More... | |
| bool | collided (pair< WorldObject *, WorldObject * > key) |
| Lets us know if a collision had precviously occurred (order independent). More... | |
| void | markCollision (WorldObject *a, CollisionObject *ac, WorldObject *b, CollisionObject *bc) |
| Mark Collision as occurred. More... | |
| vector< tuple< WorldObject *, CollisionObject *, WorldObject *, CollisionObject * > > * | getCollisions (WorldObject *a, WorldObject *b) |
| returns list of collisions More... | |
| void | clear () |
| Clears all collision data from last run. More... | |
Static Public Member Functions | |
| static Collision * | collider () |
| gives us our Collision helper singleton More... | |
Public Attributes | |
| vector< vector< WorldObject * > > | CollisionLists |
| Sets of collision lists to check detection. More... | |
| vector< map< Point2D, vector < WorldObject * > > > | Buckets |
| Buckets into which items fall for collision (determined each loop) More... | |
| map< pair< WorldObject *, WorldObject * >, vector < tuple< WorldObject *, CollisionObject *, WorldObject *, CollisionObject * > > * > | Collisions |
| Map that provides a cache of all collidied objects for a given object (clears each loop) Note:initial key is pair of two objects checking collision, values are world object and associated collision object. More... | |
| unsigned int | CellWidth |
| The width of partition cells. More... | |
| unsigned int | CellHeight |
| The height of partition cells. More... | |
Static Public Attributes | |
| static Collision * | m_instance = NULL |
| instance of Collision helper More... | |
Detailed Description
This defines Collision caching as well as the ability to sort into buckets.
This class is tasked with the following:
- Handling and Caching collisoins
- Splitting objects into buckets
- Storing Collision lists
- Todo:
- change this to where you can specify collision from object poll perspective or by partitioning and listing collisions for all objects in a map.
Definition at line 25 of file Collision.h.
Constructor & Destructor Documentation
|
inline |
|
inline |

Member Function Documentation
|
inline |
Clears all collision data from last run.
Definition at line 94 of file Collision.h.
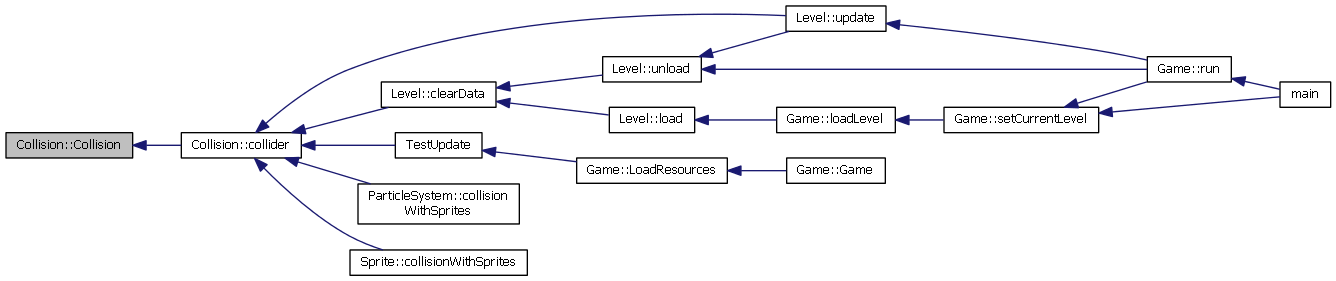
Here is the caller graph for this function:
|
inline |
Lets us know if a collision had precviously occurred (order independent).
- Parameters
-
a first object b second object
- Returns
- whether there was a previous collision
Definition at line 55 of file Collision.h.
Here is the caller graph for this function:
|
inline |
Lets us know if a collision had precviously occurred (order independent).
- Parameters
-
key the combined pair of two worldobject*s
- Returns
- whether there was a previous collision
Definition at line 62 of file Collision.h.
|
inlinestatic |
gives us our Collision helper singleton
Definition at line 43 of file Collision.h.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function: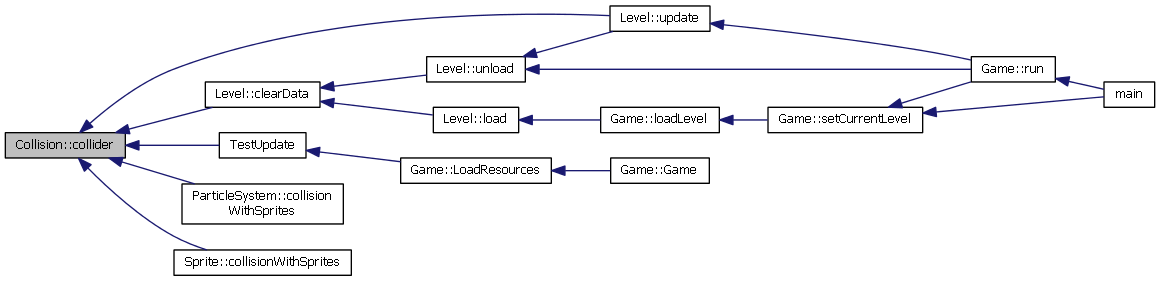
|
inline |
returns list of collisions
- Parameters
-
a first object b second object
- Returns
- list of all collisions
Definition at line 83 of file Collision.h.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
|
inline |
Mark Collision as occurred.
Definition at line 67 of file Collision.h.
Member Data Documentation
| vector< map< Point2D, vector< WorldObject* > > > Collision::Buckets |
Buckets into which items fall for collision (determined each loop)
Definition at line 34 of file Collision.h.
| unsigned int Collision::CellHeight |
The height of partition cells.
Definition at line 37 of file Collision.h.
| unsigned int Collision::CellWidth |
The width of partition cells.
Definition at line 36 of file Collision.h.
| vector< vector< WorldObject* > > Collision::CollisionLists |
Sets of collision lists to check detection.
- Todo:
- make sure that things get removed from this and add at the appropriate time (think streaming maybe instead of hard level boundaries because otherwise we're going to have overlap issues)
Definition at line 33 of file Collision.h.
| map< pair< WorldObject*, WorldObject* >, vector< tuple< WorldObject*, CollisionObject*, WorldObject*, CollisionObject* > >* > Collision::Collisions |
Map that provides a cache of all collidied objects for a given object (clears each loop) Note:initial key is pair of two objects checking collision, values are world object and associated collision object.
Definition at line 35 of file Collision.h.
|
static |
instance of Collision helper
Definition at line 38 of file Collision.h.
The documentation for this class was generated from the following files:
